
ANIMAL’s feature Artist’s Notebook asks artists to show us their original “idea sketch” next to a finished artwork or project. This week, Los Angeles-based artist Sterling Crispin talks about Charon — a technically complex year-long project creating a gorgeous sculpture derived from a flight path of a drone.
In short, Charon is an interactive installation and sculpture created from an autonomous quadcopter which is intended to physically embody the tension between humans, robotic autonomous agents, and the virtual models which these agents rely on to understand the world.
Overall, note taking, map making, sketching and screenshots are all very active elements of my art making practice. It’s not uncommon for me to take a few hundred screenshots in a day while experimenting with the visual aspect of a project. I produce many variations of a work which are never shown, and sometimes these approaches branch off into their own artwork. Before Charon could fly well enough to be satisfyingly interactive, I made an artwork using the drone called Topology of Desire, which I consider to be more of a sketch then a fully resolved artwork. By map making I mean creating diagrams of ideas and relationships between ideas. I do this while reading to analyze a text and also while brainstorming for new ideas.
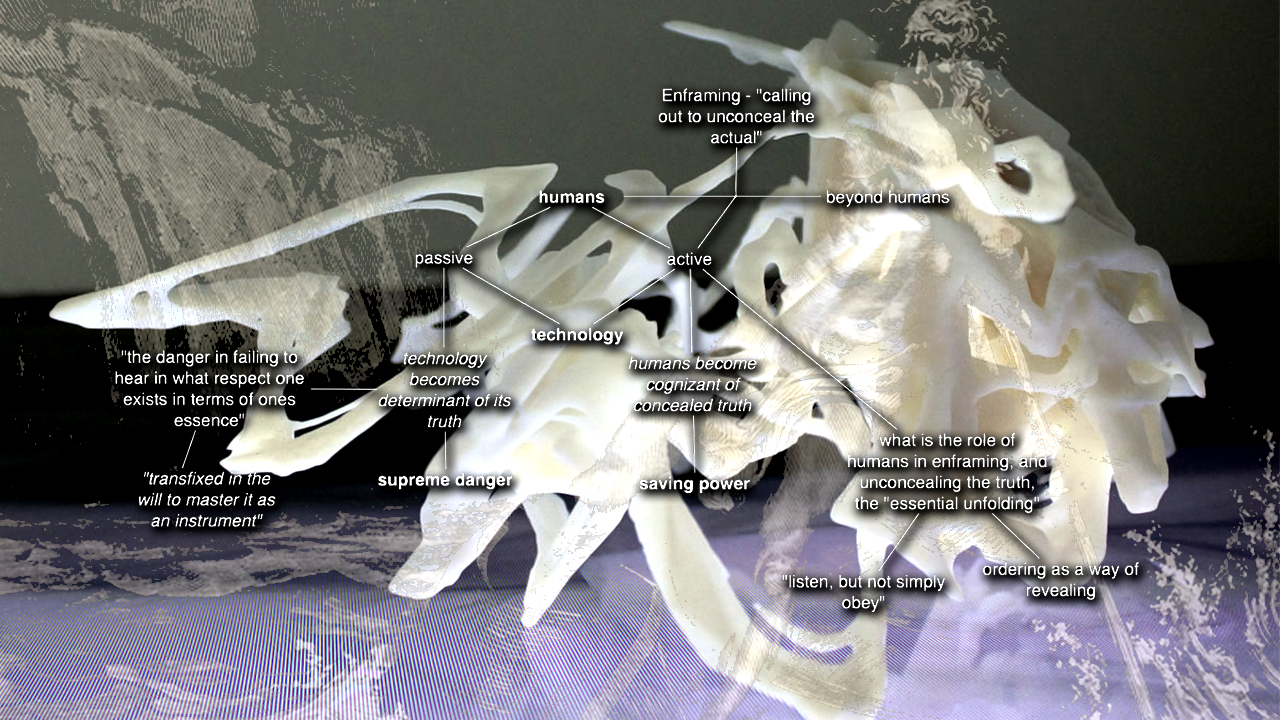
For example, this is a note I took while reading Heidegger’s “The Question Concerning Technology”, and it relates to Charon. Heidegger says that ‘The essence of technology resides in a poetic dwelling near the truth of Being,’ and sentiments like that really drive my interest in the fusion of art and technology.

Charon was created in the TransLAB at UCSB over an 18-month period from the beginning of 2012 to mid 2013. The TransLAB is a multimedia virtual reality room with an 18.2 surround sound speaker system, floor to ceiling 3D projections across most of the walls and floor, and an optitrack motion capture camera system made by Natural Point. The lab acquired an AR-Drone in January 2012 which has an API and can be programmed, and after seeing some work by ETH Zurich’s Flying Machine Arena I knew the potential for something amazing was there. Over the course of a year Tim Wood, RJ Duran and myself worked out the flight mechanics and math to get autonomous software based flight with the AR-Drone platform and developed OpenDroneControl (ODC), which is an open source framework for creative projects with drones. ODC works with Processing, Max, OpenFrameworks and we hoped it would be an entry point for other people wanting to get into this sort of thing. We ran a workshop at NYU ITP as a part of the first Drones and Aerial Robotics Conference last October using this software.
Charon was the longest I’ve ever worked on a single project, and over the course of that time I did a lot of studies trying to think about how to poetically and tactfully approach such a politically loaded medium. By that I mean the medium of the drone, of the autonomous robot, of the Technological Other. I think there’s something inherently political in using what is an essentially military technology for art, but I didn’t want to explicitly focus on the political aspects of quadcopters, robotics and drones. I think that is an important conversation to be had, but many other artists and activists have touched upon it and I felt it was important to attempt to create something beautiful, and more contemplative in nature. What is the relationship we are developing with these robotic entities, why are we creating them, how do they see us, how does their existence redefine who we are?

Once ODC was developed enough that the quadcopter could fly in a reasonably stable way my first studies involved thinking about wind, fluid dynamics, and then the psyche or headspace of the drone. The following gif’s are taken from videos where a fan was blowing a piece of plastic lit by a spotlight while the drone attempted to hover in place within the airstream. There’s something very interesting about the relationship between the internal world-model of the drone, the calculations it uses to keep flying, and the dynamic unpredictable nature of the wind. Actually the drone in this situation is somewhat blind, it only knows where it’s own body is via the motion capture cameras, everything else in the room is basically invisible to the drone.

This experiment really got me thinking about the transmission of information into the headspace of the drone, then back out into the real world via its actions, which was a huge part of how the final work developed and why it’s called Charon. The diagram below is from the final piece and explains the feedback loop between the virtual environment, the drone, and the physical environment in the lab. It’s a little subtle and hard to tell in the documentation of Charon on my website, but there’s a fairly complex virtual world being projected against the wall in the background. It’s not just the flight path but also a kind of virtual wind being created from a basis function.

This “wind” created by the basis function pushes in virtual space against the drone just like the wind in these studies pushed against the drone in physical space. It’s because of this that Charon get’s its name from the ferryman on the river styx, the navigator between the world of the living and the world of the dead. Charon is a bridge between virtual reality and physical reality, between humans and cyberspace. I really love the etchings of Gustave Doré, so I’ve included one of Charon for context.

One of the questions I’m asked most about the project is, “why is the flightpath shaped like that and not just a line in space?” The flight path of the quadcopter could be described as a series of points captured over time connected by a line, however as the video of the performance of Charon shows, the flight is more expressive than just a position over time. To make the rotation, tilt, yaw and velocity of the flight more visible, the simulation being run within Charon places small sphere-like nodes every 1/4th of a second along the path. These nodes are shaped based on the current flight data, and are then connected to one another forming thick branch like shapes. Also as the drone flies around the room it can push and deform its previous flight path by colliding with it in virtual space, this gives the piece a kind of history and memory to it which I think is important. Below you can see the flight path with interconnected nodes (left), the raw path (right), and the virtual drone in pink.

For the sake of clarity, shown below is a flat plane in three dimensional space being run through the same basis function used to distort the flight path of Charon into a wind-like resistant force.

The image below is a screenshot of the flightpath captured from the performance used for the sculpture of Charon.

The image below is a screenshot of the flightpath captured from the performance used for the sculpture of Charon. The little pink dots in the image are particles blowing in the basis-function-wind. The physical sculpture was 3D printed on an Objet Eden which places layers of resin 1/20th the width of a human hair ontop of eachother until the final product is realized.

I filmed the performance of Charon at least two dozen times, these are some gifs from the first full video of the piece. I think it shows the flight path and virtual aspects of the project much clearer, but it became important to me to show the computer systems which drive the work.

While rehearsing I was also capturing hundreds of flight paths, below is an example of another captured flight path.

For the final video I also laid down a white tarp in the tracking space and wore a motion capture suit to drive across the point that its an autonomous system in a measured, tracked space.

When I capture a flight path from the simulation in OpenGL its very messy geometry, and not possible to 3D print with the click of a button. The image below shows how non-conformal, self-intersecting all the faces are, and how wrong all of the normals are from a flight path. If you’ve ever worked with a 3D printer you’ll know that this file is a nightmare and not printable. I have a very particular process of converting the nightmare of this geometry into something printable which I won’t share for proprietary purposes, but it gives you a sense of the complexity involved.

These images show the intense amount of labor that was required to clean the 3D print from its scaffolding.

To the left is the print with all of the scaffolding required to hold it up while being printed, and to the right is the cleaned, final object.
CRISPIN STERLING, CHARON (2014)

Previous Artist’s Notebook selects:
Artist’s Notebook: Monica Canilao
Artist’s Notebook: Ramsey Nasser
Artist’s Notebook: Rhett Jones
Artist’s Notebook: Clement Valla
Artist’s Notebook: Parker Shipp
Artist’s Notebook: Eva Papamargariti
Artist’s Notebook: Brenna Murphy
Artist’s Notebook: Jonathan Monaghan
Artist’s Notebook: Adam Ferriss
Artist’s Notebook: Andrea Crespo
Artist’s Notebook: Genevieve Belleveau
Artist’s Notebook: Melissa F. Clarke
